Устройство и работа контроллера КУКП-3
В контроллере КУКП-3 конструктивно объединены два функциональных узла:
Число аналоговых входов контроллера КУКП-3 - 32.
Входы ТИТ контроллера КУКП-3 - токовые, на входе канала установлен токовый шунт, рассчитанный на 5 мА. Низкопотенциальные цепи каналов имеют общую точку, которая должна быть связана с землей (на клеммнике). Высокопотенциальные цепи имеют защиту от повреждающих помех и коммутируются.
Контроллер КУКП-3 выпускается взамен ранее выпускавшихся контролеров КУКП, КУКП-М, КУКП-2 и может использоваться для их замены. Исполнение контроллера КУКП-3, поставляемого отдельно для замены контроллеров типа КУКП и КУКП-М оговаривается при заказе.
Габаритные размеры КУКП-3 - 25025430 мм.
Масса КУКП-3 не превышает 0,5 кг.
Питание КУКП-3 осуществляется от блока питания БПКП.М напряжением 27 В постоянного тока. Мощность, потребляемая КУКП-3 от блока питания, не превышает 5,5 Вт.
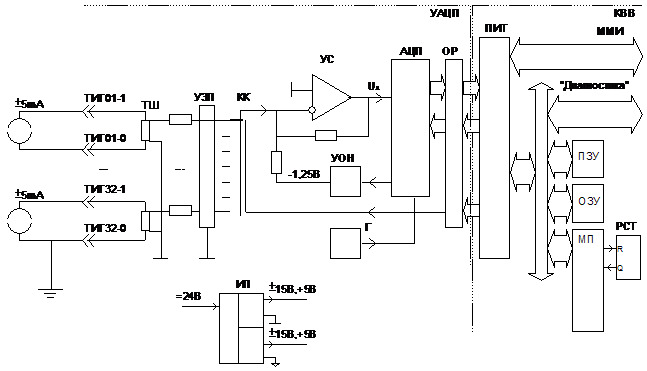
Схема электрическая функциональная КУКП-3 приведена на рис.21. Схема электрическая принципиальная контроллера КУКП-3 приведена в приложении 1. Контроллер состоит из следующих основных узлов (в скобках приведено позиционное обозначение элементов на схеме электрической принципиальной контроллера):
Работа узла УАЦП контроллера КУКП-3
Каналы ТИТ контроллера КУКП-3 имеют гальваническую развязку от процессорного узла контроллера КУКП-3, которую обеспечивают:
Условные обозначения цепей и одноименных сигналов, обеспечивающих электрическую связь и функционирование УАЦП и процессорного узла:
Рассмотрим измерительный тракт УАЦП на примере одного (первого) канала контроллера. Измеряемый ток с выхода датчика поступает по цепям ТИТ01-1 (высокопотенциальный вход) и ТИТ01-0 (низкопотенциальный вход) на токовый шунт ТШ. Падение напряжения на шунте, пропорциональное величине входного тока, поступает на вход сумматора УС через узел защиты от перенапряжения УЗП и открытый канал коммутатора КК. На второй вход сумматора подается опорное напряжение минус 1,25 В с выхода УОН. В результате на выходе УС (на входе АЦП) формируется напряжение:
 ,
,
где: Iвх - входной ток; Rш - сопротивление шунта. Для входных токов от минус 5 до плюс 5 мА при Rш»500 Ом интервал значений Uх составляет от 0 до 2,5 В. Напряжение Uх преобразуется АЦП в кодовую форму и передается через оптронную развязку ОР в процессорный узел. Процессор имеет доступ к входному коммутатору КК, обеспечивая переключение каналов. Систематическая инструментальная погрешность канала измерения компенсируется процессором контроллера по тарировочным коэффициентам, устанавливаемым при выпуске контроллеров в ППЗУ.
Схема РСТ (тайм-сторож) предназначена для начального пуска микропроцессора и его рестарта в случае сбоя программы. В процессе выполнения основного цикла программы микропроцессор МП должен периодически выдавать на узел РСТ сигнал регенерации тайм-сторожа. Если МП это условие не выполняет, схема РСТ вырабатывает сигнал RES рестарта МП.
Вилка "ДИАГНОСТИКА", выведенная на лицевую панель контроллера, предназначена для подключения отладочного оборудования при техническом обслуживании контроллера или управляемых им модулей. При подключении адаптера типа ТА-3 процессор контроллера КУКП-3 обеспечивает вывод на дисплей адаптера запрашиваемых (переключателями адаптера) реальных данных из оперативной памяти.
Межмодульный интерфейс ММИ функционирует под управлением МП через программируемый интерфейс элемента ПИТ. Вилка "ИНТЕРФЕЙС УКПМ", выведенная на тыльную панель КУКП-3, предназначена для связи с модулями и контроллерами УКПМ по магистрали межмодульного интерфейса, а также для ввода цепей электропитания контроллера.
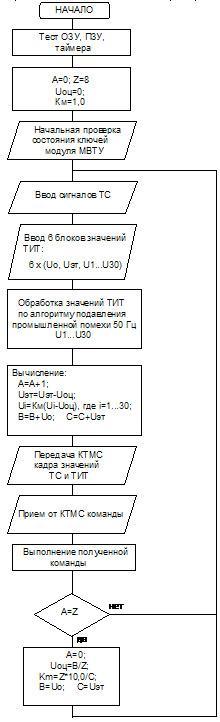
Блок-схема алгоритма работы контроллера КУКП-3 приведена на рис.22. На блок-схеме обозначены:
Процедура цифровой обработки результатов измерения обеспечивает подавление в выходном значении помехи промышленной частоты 500,5 Гц на нормируемом уровне.
Работа контроллера КУКП-3 в режиме ввода-вывода дискретных сигналов
Контроллер КУКП-3 обеспечивает управление модулями по цепям ММИ:
Управление сигналами интерфейсного обмена осуществляется записью в порт РВ ПИТ байта управления. Комбинация состояний разрядов D5, D6 и D7 байта управления определяет позиционный адрес модуля, выбранного контроллером для информационного обмена.
Линии данных D0...D7 ММИ считываются через буфер 2D10, выдача данных на внешние устройства осуществляется через регистр 2D12.
После рестарта процессор контроллера осуществляет тестирование собственных ресурсов: ОЗУ, ПЗУ и таймера. При нормальном завершении внутренних тестов процессор выставляет сигнал (КТМС=1) готовности обмена с контроллером типа КТМС. При работе контроллеров в штатном режиме по контроллер КТМС периодически производит выборку кадра данных у контроллера КУКП-3, что индицируется синхронно мигающим индикатором "РБТ" на лицевой панели КУКП-3.
Информационный обмен КУКП с КТМС
Диаграмма обмена между КУКП и КТМС представлена на рис.23. В режиме обмена информацией процессоры КУКП и КТМС поддерживают дисциплину обмена: КУКП принят запрос/команда - выдан кадр сообщения/квитанция.
Передача запроса/команды из КТМС в КУКП производится следующим образом. При готовности обмена с КТМС процессор КУКП устанавливает на линии “КТМС” высокий уровень сигнала КТМС=1. Процессор КТМС, получив состояние КТМС=1, выставляет на линиях ”D0...D7” ММИ первый байт запроса/команды и состояние ОТВЕТ=1. Процессор КУКП через временной промежуток Т1, необходимый для устранения перекоса данных на приеме, считывает данные и информирует о приеме данных состоянием КТМС=0. Получив состояние КТМС=0, процессор КУКП возвращает уровень на линии “ОТВЕТ” в исходное состояние: ОТВЕТ=0. Процесс передачи байта данных из КТМС в КУКП завершен. Последующие байты запроса/команды передаются аналогично.
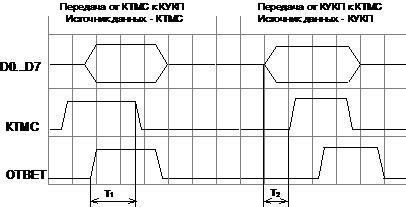
После анализа полученного запроса/команды процессор КУКП выдает в адрес КТМС информационный кадр/квитанцию. При состоянии ОТВЕТ=0 процессор КУКП выставляет на линиях "D0...D7" ММИ первый байт информационного кадра данных (квитанции). Синхронизация данных через временной промежуток Т2, необходимый для устранения перекоса данных на приеме КТМС, осуществляется состоянием КТМС=1. При получении состояния КТМС=1 процессор КТМС считывает с линий "D0...D7" ММИ данные и выставляет сигнал подтверждения приема данных: ОТВЕТ=1. Процессор КУКП, приняв состояние ОТВЕТ=1, снимает данные с порта А и устанавливает состояние КТМС=0. Получив состояние КТМС=0, процессор КТМС возвращает в исходное состояние сигнал ОТВЕТ: ОТВЕТ=0. Процесс передачи байта данных из КУКП в КТМС завершен. Последующие байты информационного кадра передаются аналогично.
Никто пока не комментировал эту страницу.