Перед настройкой зоны пропорциональности интегральная и дифференциальная компоненты отключаются, либо постоянная интегрирования устанавливается максимально возможной, а постоянная дифференцирования- минимально возможной. Устанавливается необходимая уставка SP. Зона пропорциональности устанавливается равной 0 (минимально возможной). В этом случае регулятор выполняет функции двухпозиционного регулятора. Регистрируется переходная характеристика.
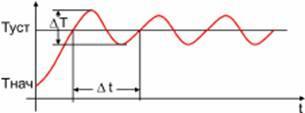
Рис. 1
Тнач - начальная температура в системе
Туст - заданная температура (уставка)
 - размах колебаний температуры
- размах колебаний температуры
 - период колебаний температуры
- период колебаний температуры
Установить зону пропорциональности равной размаху колебаний температуры: Pb=DТ. Это значение служит первым приближением для зоны пропорциональности. Следует проанализировать переходную характеристики еще раз и при необходимости скорректировать значение зоны пропорциональности. Возможные варианты переходных характеристик показаны на рис.2.
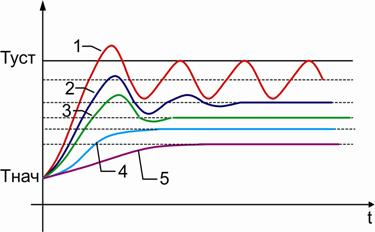
Рис. 2
Переходная характеристика типа 1
Значение зоны пропорциональности по-прежнему очень мало, переходная характеристика (а значит, и настройка регулятора) далека от оптимальной. Зону пропорциональности следует значительно увеличить.
Переходная характеристика типа 2
В переходной характеристике наблюдаются затухающие колебания (5-6 периодов). Если в дальнейшем предполагается использовать и дифференциальную компоненту ПИД регулятора, то выбранное значение зоны пропорциональности является оптимальным. Для этого случая настройка зоны пропорциональности считается законченной.
Если в дальнейшем дифференциальная компоненты использоваться не будет, то рекомендуется еще увеличить зону пропорциональности так, чтобы получились переходные характеристики типа 3 или 4.
Переходная характеристика типа 3
В переходной характеристике наблюдаются небольшой выброс и быстро затухающие колебания (1-2 периода). Этот тип переходной характеристики обеспечивает хорошее быстродействие и быстрый выход на заданную температуру. В большинстве случаев его можно считать оптимальным, если в системе допускаются выбросы (перегревы) при переходе с одной температуры на другую.
Выбросы устраняются дополнительным увеличением зоны пропорциональности так, чтобы получилась переходная характеристика типа 4.
Переходная характеристика типа 4
Температура плавно подходит к установившемуся значению без выбросов и колебаний. Эта тип переходной характеристики также можно считать оптимальным, однако быстродействие регулятора несколько снижено.
Переходная характеристика типа 5
Сильно затянутый подход к установившемуся значению говорит о том, что зона пропорциональности чрезмерно велика. Динамическая и статическая точность регулирования здесь мала.
Следует обратить внимание на два обстоятельства. Во-первых, во всех рассмотренных выше случаях установившееся значение температуры в системе не совпадает со значением уставки. Чем больше зона пропорциональности, тем больше остаточное рассогласование. Во-вторых, длительность переходных процессов тем больше, чем больше зона пропорциональности. Таким образом, нужно стремиться выбирать зону пропорциональности как можно меньше. Вместе с тем, остаточное рассогласование, характерное для чисто пропорциональных регуляторов (П-регуляторов), убирается интегральной компонентой регулятора.
Никто пока не комментировал эту страницу.