
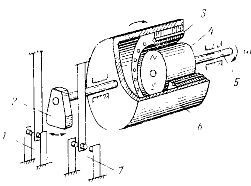
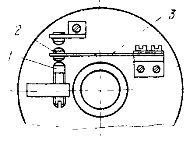
В схемах торможения противотоком асинхронных электродвигателей широко применяют индукционное реле контроля скорости. С валом электродвигателя, угловую скорость которого необходимо контролировать, связывают входной вал реле 5, на котором установлен цилиндрический постоянный магнит 4.
При вращении электродвигателя поле магнита пересекает проводники короткозамкнутой обмотки 3 поворотного статора 6. В обмотке наводится ЭДС, величина которой пропорциональна угловой скорости вращения вала. Под ее воздействием в обмотке появляется ток и возникает сила взаимодействия, стремящаяся повернуть статор 6 в сторону вращения магнита.
При определенной частоте вращения сила возрастает настолько, что упор 2, преодолевая сопротивление плоской пружины, переключает контакты реле. Реле снабжено двумя контактными узлами: 1 и 7, которые переключаются в зависимости от направления вращения.
Индукционное реле контроля скорости имеет довольно сложную конструкцию и низкую точность, которая может быть приемлемой только для грубых систем управления. Более высокая точность контроля скорости может быть получена с помощью тахогенератора — измерительной микромашины, напряжение на зажимах которой прямо пропорционально скорости вращения.
Тахогенераторы используют в системах обратной связи регулируемого привода с большим диапазоном изменения скорости, и поэтому погрешность их составляет всего несколько процентов. Наибольшее распространение имеют тахогенераторы постоянного тока.
На рис. 2 показана схема реле контроля скорости электродвигателя М с применением тахогенератора G, в цепь якоря которого включено электромагнитное реле К и регулировочный реостат R. Когда напряжение на зажимах якоря тахогенератора превысит напряжение срабатывания, реле производит переключение во внешней цепи.
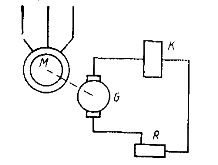
С увеличением сопротивления цепи якоря точность работы схемы повышается. Поэтому иногда реле подключают к тахогенератору через промежуточный полупроводниковый усилитель. Возможно также использование для этой цели полупроводниковых бесконтактных пороговых элементов, обладающих стабильным напряжением срабатывания.
Надежность работы схемы может быть повышена, если тахогенератор постоянного тока заменить бесконтактным асинхронным тахогенератором.
Асинхронный тахогенератор имеет полый немагнитный ротор, выполненный в виде стакана. На статоре размещены две обмотки, находящиеся под углом 90° друг к другу. Одну из обмоток включают в сеть переменного тока. С другой обмотки снимают синусоидальное напряжение, пропорциональное частоте вращения ротора. Частота выходного напряжения всегда равна частоте сети.
В современных исполнительных электродвигателях постоянного тока тахогенератор встраивают в один корпус с машиной и устанавливают на одном валу с основным двигателем. Это уменьшает пульсации выходного напряжения и повышает точность регулирования скорости.
В электродвигателях серии ПБСТ обычно применяют тахогенераторы постоянного тока типа ПТ-1 с электромагнитным возбуждением. Высокомоментные электродвигатели постоянного тока имеют встроенный тахогенератор с возбуждением от постоянных магнитов.
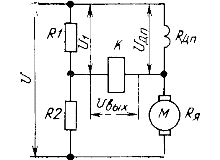
В тех случаях, когда электродвигатель М постоянного тока тахогенератора не имеет, его скорость можно контролировать измеряя ЭДС якоря. Для этого используют схему тахометрического моста, который образован двумя резисторами: R1 и R2, якорем Rя и добавочными полюсами машины Rдп. Выходное напряжение тахометрического моста Uвых = U1 - Uдп , или
Uвых = (Rдп / Rдп + Rя) х Е = (Rдп / Rдп + Rя) х сω
Последнее равенство справедливо при условии постоянства магнитного потока электродвигателя. Включая на выходе тахометрического моста пороговый элемент, получают реле, настроенное на определенную угловую скорость вращения. Точность тахометрического моста невелика из-за непостоянства сопротивления щеточного контакта и нарушения равновесия при нагреве сопротивления.
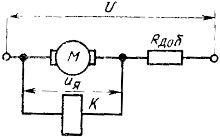
Если электродвигатель постоянного тока работает на искусственной характеристике и в цепь якоря включено большое добавочное сопротивление, функции реле скорости может выполнить реле напряжения, включенное на зажимы якоря.
Напряжение на якоре электродвигателя Uя = E + IяRя.
Поскольку Iя = (U - Е) / (Rя + Rдоб), получим Uя = (Rдоб / (Rя + Rдоб)) х Е + (Rя / (Rя + Rдоб)) х U, то вторым слагаемым можно пренебречь и считать напряжение на зажимах якоря прямо пропорциональным ЭДС и скорости вращения электродвигателя.
Очень простую конструкцию имеют центробежные реле скорости. Основанием реле служит пластмассовая планшайба 4, установленная на валу, скорость вращения которого необходимо контролировать. На планшайбе закрепляются плоская пружина 3 с массивным подвижным контактом 2 и неподвижный регулируемый контакт 1. Пружина выполнена из специальной стали, модуль упругости которой практически не зависит от изменения температуры.
При вращении планшайбы на подвижный контакт действует центробежная сила, которая при определенной скорости вращения преодолевает сопротивление плоской пружины и производит переключение контактов. Токоподвод к контактному узлу осуществляют через контактные кольца и щетки, которые на рисунке не показаны. Такие реле используют в системах стабилизации скорости микродвигателей постоянного тока. Несмотря на свою простоту, система обеспечивает поддержание скорости с погрешностью порядка 2%.
Никто пока не комментировал эту страницу.